The 'NXP Cup' National College Student Smart Car Race
National Final Duel-Car Race Group, ChangShu, China, August 2017.
Introduction
The National College Student Smart Car Race is a national-level scientific and technological innovation practice event for university students. It was initiated in 2005 by the Teaching Guidance Committee for Automation Majors in Higher Education Institutions under the Ministry of Education. Since 2020, the competition has been organized by the Chinese Association of Automation. Originally named the "Freescale Cup", the competition was renamed the "NXP Cup" in 2016 following NXP Semiconductors' acquisition of Freescale in 2015.
The competition is guided by the philosophy of "focusing on talent development, prioritizing participation, encouraging exploration, and pursuing excellence." It aims to cultivate students' innovative engineering practical capabilities and teamwork spirit by comprehensively applying multidisciplinary knowledge to design and build intelligent model cars that address various engineering challenges.
The competition releases new annual challenges, including speed-racing categories such as Camera Group and Electromagnetic Group, along with cutting-edge innovative categories incorporating emerging technologies. Participants are required to utilize micro-controllers from companies like NXP and Infineon as core controllers and develop original solutions tailored to their chosen category, implement integrated hardware-software system design and testing, and ultimately advance through regional provincial competitions to the national finals.
As of 2024, the competition has been held for nineteen editions, with over 650,000 students participating. It covers more than 30 provinces and cities, and nearly 500 universities across the country. In the 2024 final, more than 3,000 teams took part. The competition has cultivated a large number of engineering talents for the industry and academia.
Duel-Car Race Rule
Environment
The competition arena for the Duel-Car Race event is set up on a flat ground surface covered with blue advertising fabric. The perimeter of the arena is marked with 5cm-wide yellow tape, defining a competition area of approximately 5 meters × 7 meters. The vehicle launch zone, located at one corner of the arena, is demarcated by 2.5cm-wide black tape, forming a 50cm × 50cm square. Several beacons are randomly placed within the competition area, all synchronized and controlled by the event timing system. When activated, these beacons emit alternating red and infrared flashes at a frequency of 10Hz.
Process
The competing car models initially remain in the starting area with all beacons deactivated. Upon competition commencement, the system automatically activates the first beacon. The car models must then identify the beacon's orientation and perform directional movement.When a magnetic marker installed on the car model enters the induction coil near an active beacon, the system will automatically switch to illuminate the next beacon, prompting the car to proceed randomly toward the newly activated target.The total competition duration is measured from the activation of the first beacon until the final beacon is extinguished. Throughout this process, the car models must avoid colliding with beacons to prevent movement obstruction or potential damage.
Procedure
The competition consists of two stages: a qualification preliminary round and a head-to-head final. In the preliminary stage, each model car independently navigates the field to extinguish all beacon lights, with rankings determined by completion time to select finalists. During the final stage, teams are paired based on preliminary rankings for head-to-head matches. Two model cars compete simultaneously on the field, and the winner is determined by the number of beacon lights extinguished by team.
Technical Requirement
Participating teams in the Dual-Car Race are required to develop an autonomous model car capable of identifying illuminated beacons within the field and pursuing them. The vehicle must integrate fundamental functions including large-scale target detection, precise motion control, and accurate obstacle avoidance.And through comprehensive design in mechanical structures, electronic systems, control algorithms and combat strategy, the car must meet the challenges of competitive operation during head-to-head matches.
The Dual-Car Race Group is a new challenge introduced in the 12th Smart Car Race, building upon the previous single-vehicle beacon pursuit task. This marks the first time an adversarial mechanism between competing teams has been implemented in the competition. This requires us not only to achieve the fundamental objective of individual vehicle beacon tracking, but also to strategically counteract interference from the opposing vehicle and optimize beacon capture efficiency in competitive scenarios.
To address the technical challenges and engineering difficulties of this category, we first prioritized vehicle model selection. We opted for the new C-type chassis featuring dual rear-mounted RS380 motors and larger wheel hubs. Compared to traditional A-type and C-type chassis, this configuration provides significantly enhanced power output. Additionally, when contrasted with the rear single-drive B-type chassis, it delivers superior steering agility and stability during dynamic maneuvers.
Secondly, to stably acquire the positions of activated beacon lights and promptly capture large-area random signals, we employed a high-speed hardware-binarized OV7725 camera with a 120° wide-angle lens and infrared filter as the primary sensor. This was complemented by four omnidirectional HS0038B infrared sensors to detect newly activated beacon orientations. For obstacle avoidance and adversarial vehicle interaction, we integrated a forward-facing auxiliary MT9V032 grayscale camera featuring auto-exposure, high resolution, and high frame rate, enhanced with optical filtering for environmental interference suppression. Additionally, a compact 512-line 3-phase incremental encoder supporting quadrature decoding was adopted as the speed feedback sensor to enable precise closed-loop speed control.
The overall system architecture is as follows.
System Architecture
Mechanics
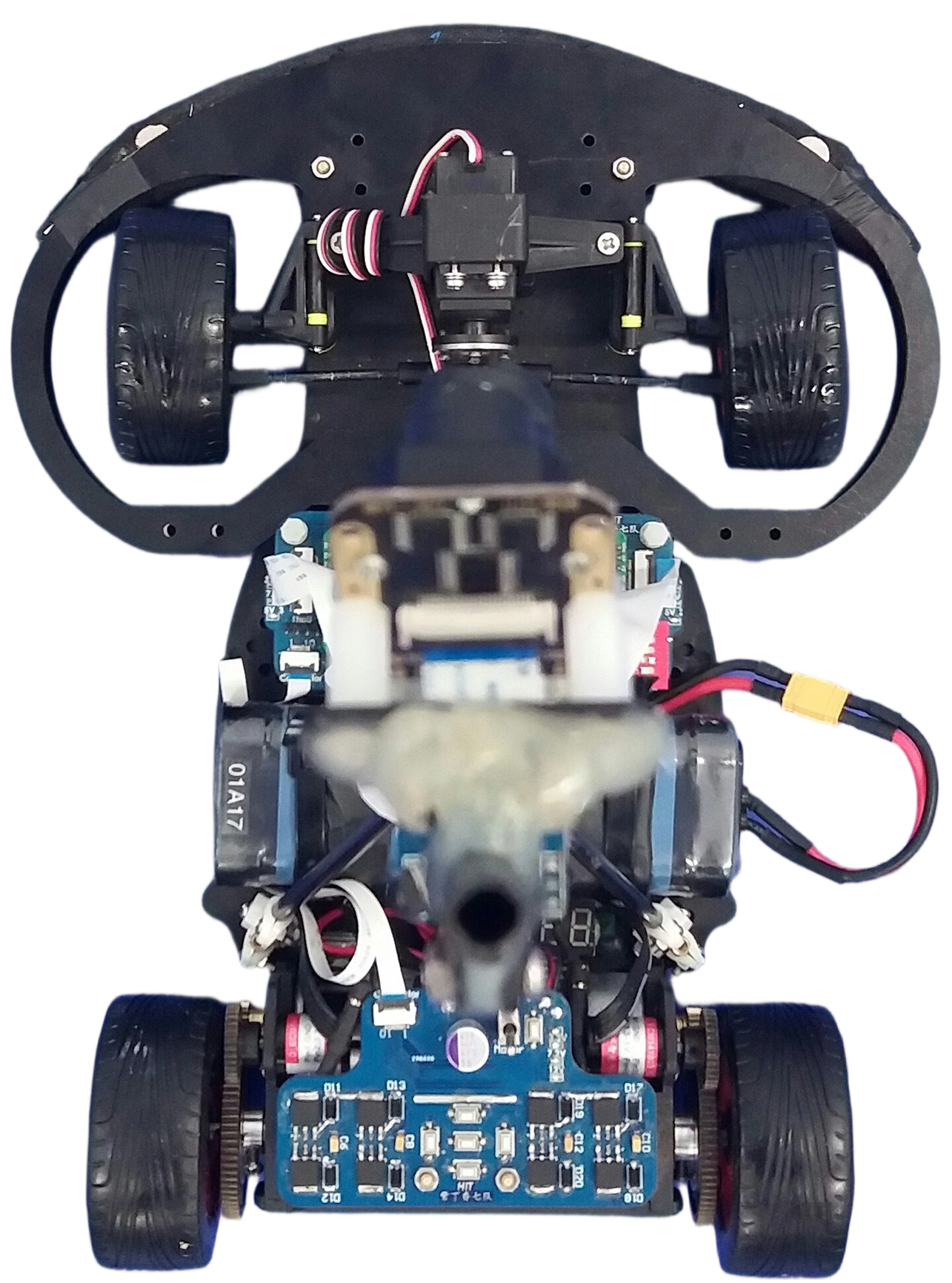
Structural optimizations focused on high-speed resilience: A lightweight yet high-strength protective frame minimized collision damage, custom light shields reduced ambient interference, and reinforced camera mounts ensured sensor stability. Chassis adjustments lowered the center of gravity via optimized front suspension and wheelbase tuning, improving traction and impact absorption. Weight distribution and energy-damping materials further enhanced durability. Collectively, these innovations balanced aggressive performance with robust reliability, enabling effective beacon capture and adversarial competitiveness in dynamic racing environments.
Below is the display of the actual vehicle.
Side ViewTop ViewIsometric View
Model Car
Hardware
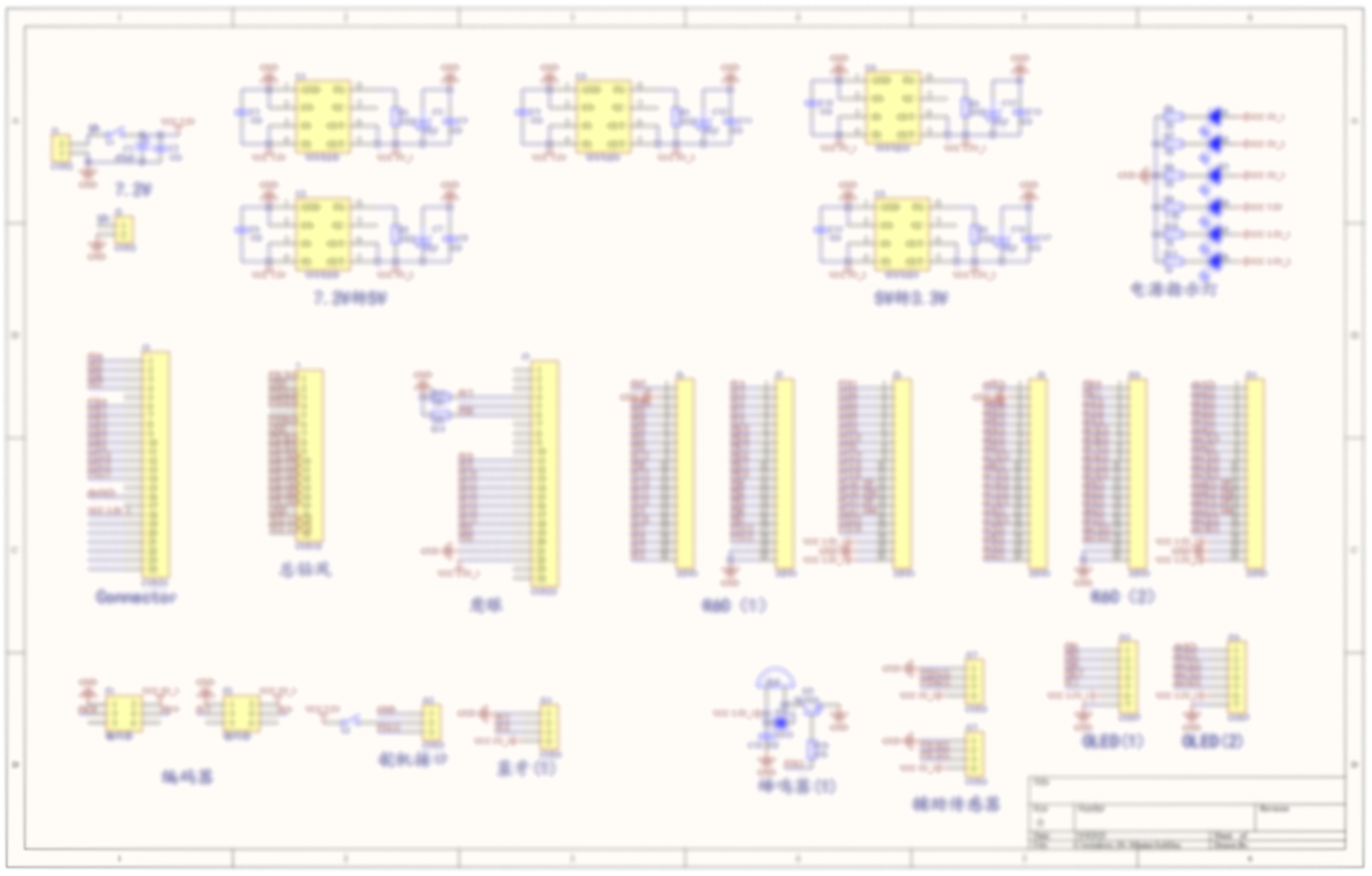
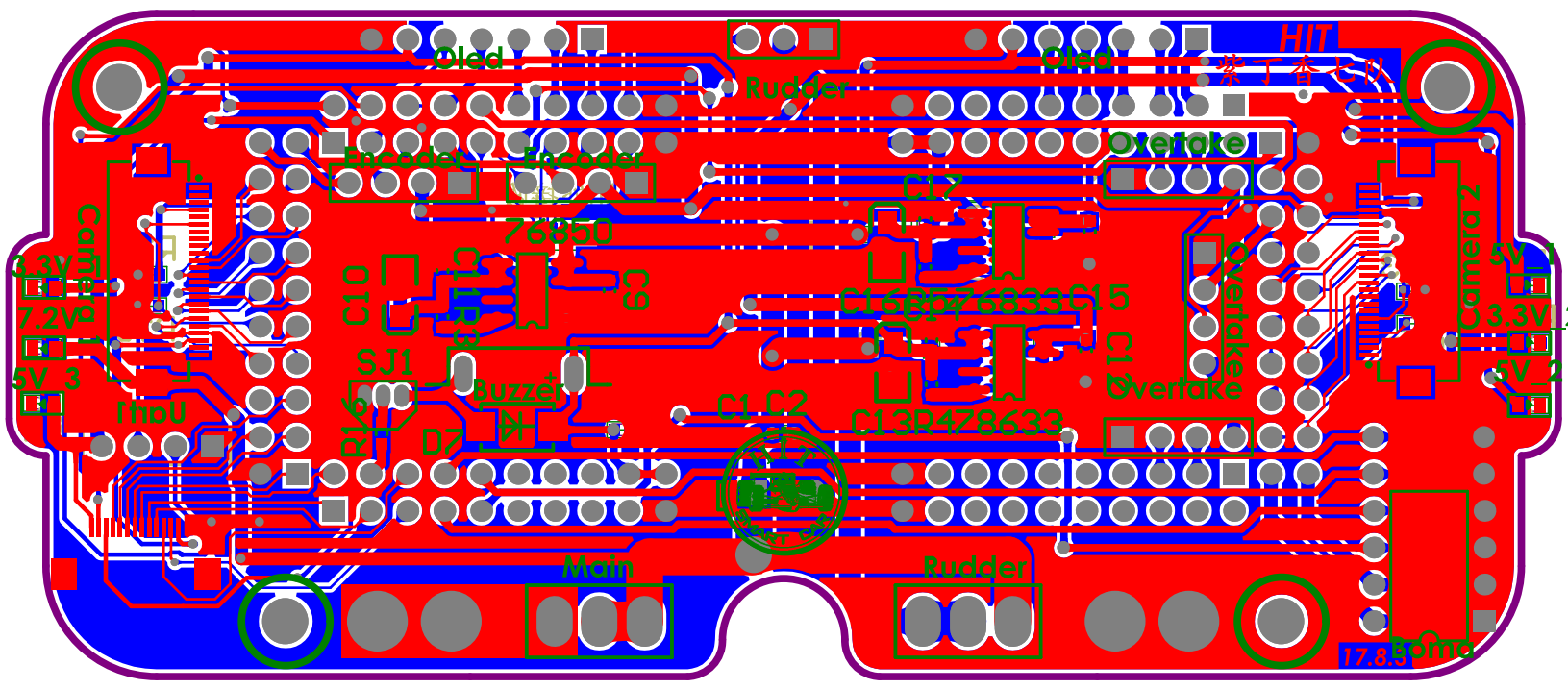
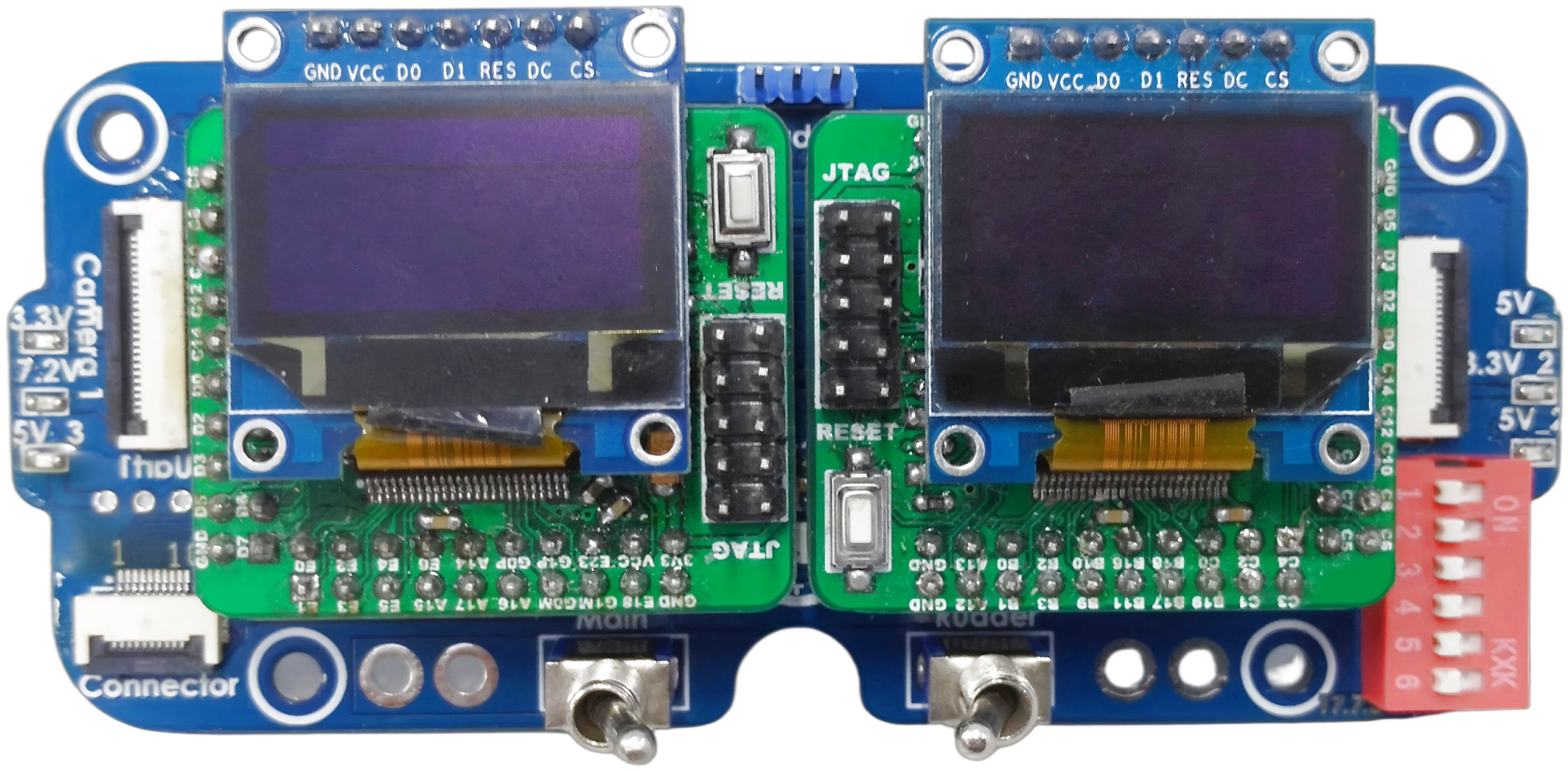
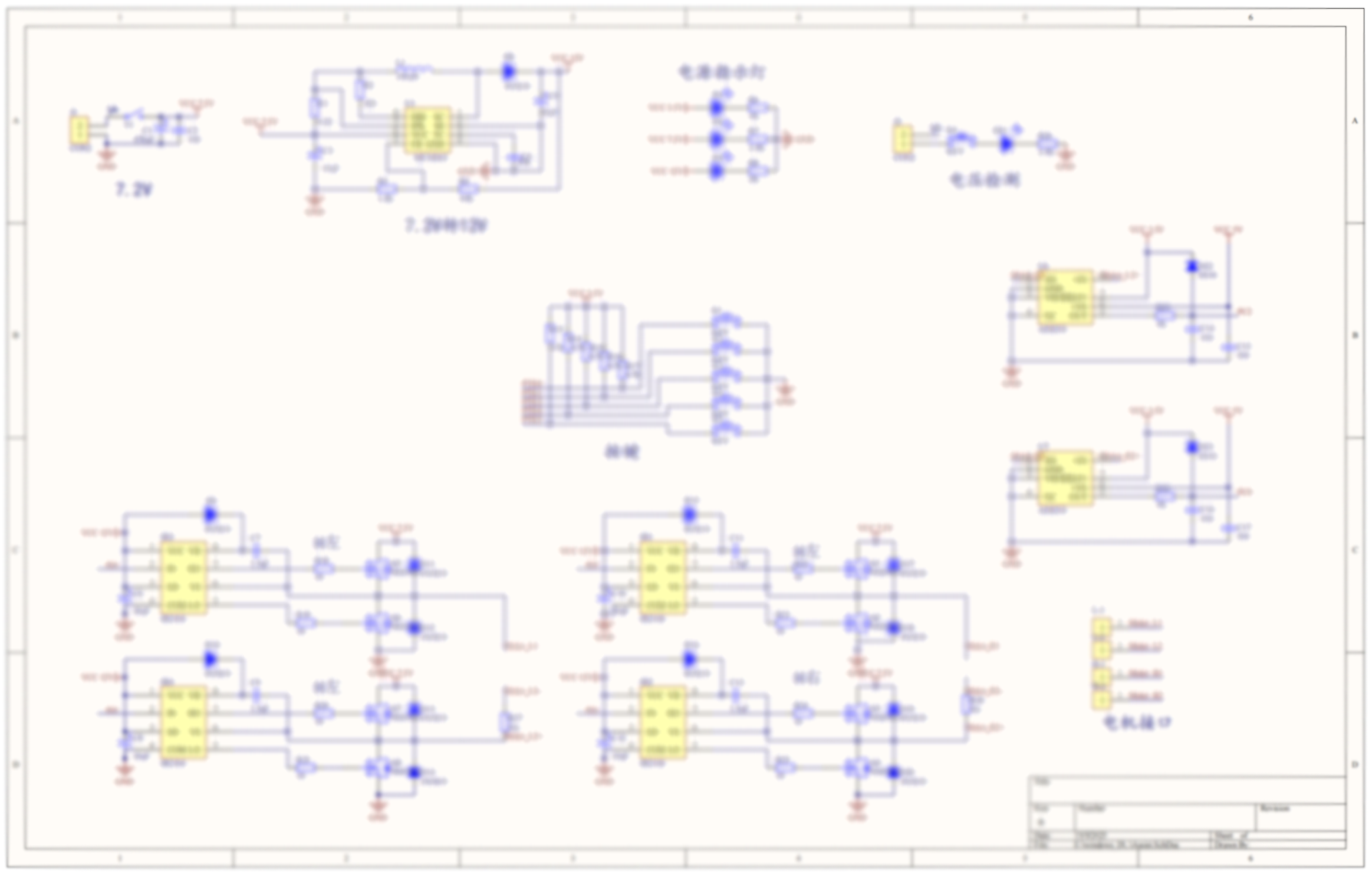
Innovatively adopting a dual-MK60 microcontroller design, we implemented parallel processing for dual-camera data streams: secondary processors handle dedicated image computation from each camera, transmitting results via UART serial communication to the primary processor for centralized decision-making. The power subsystem utilizes TI's high-performance TPS768xx linear voltage regulator series to ensure stable multi-voltage domain outputs. A symmetrical and streamlined PCB layout optimizes signal integrity and thermal management, while a user-friendly HMI enables real-time parameter tuning and system diagnostics. This architecture balances computational efficiency, electrical reliability, and operational intuitiveness.
The system's hardwares are as follows.
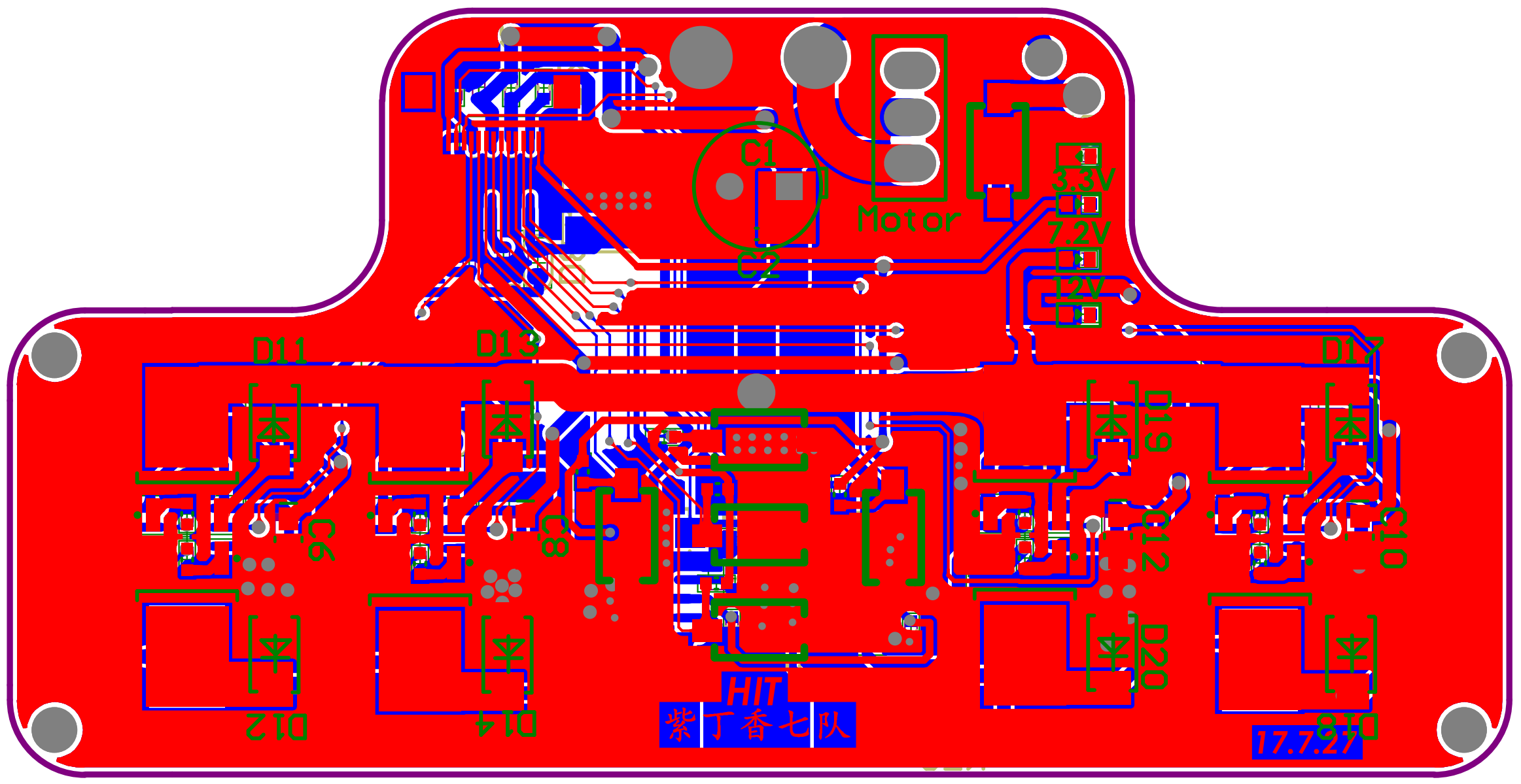
Schematic Diagram PCB Layout Physical Diagram
Master Control Board
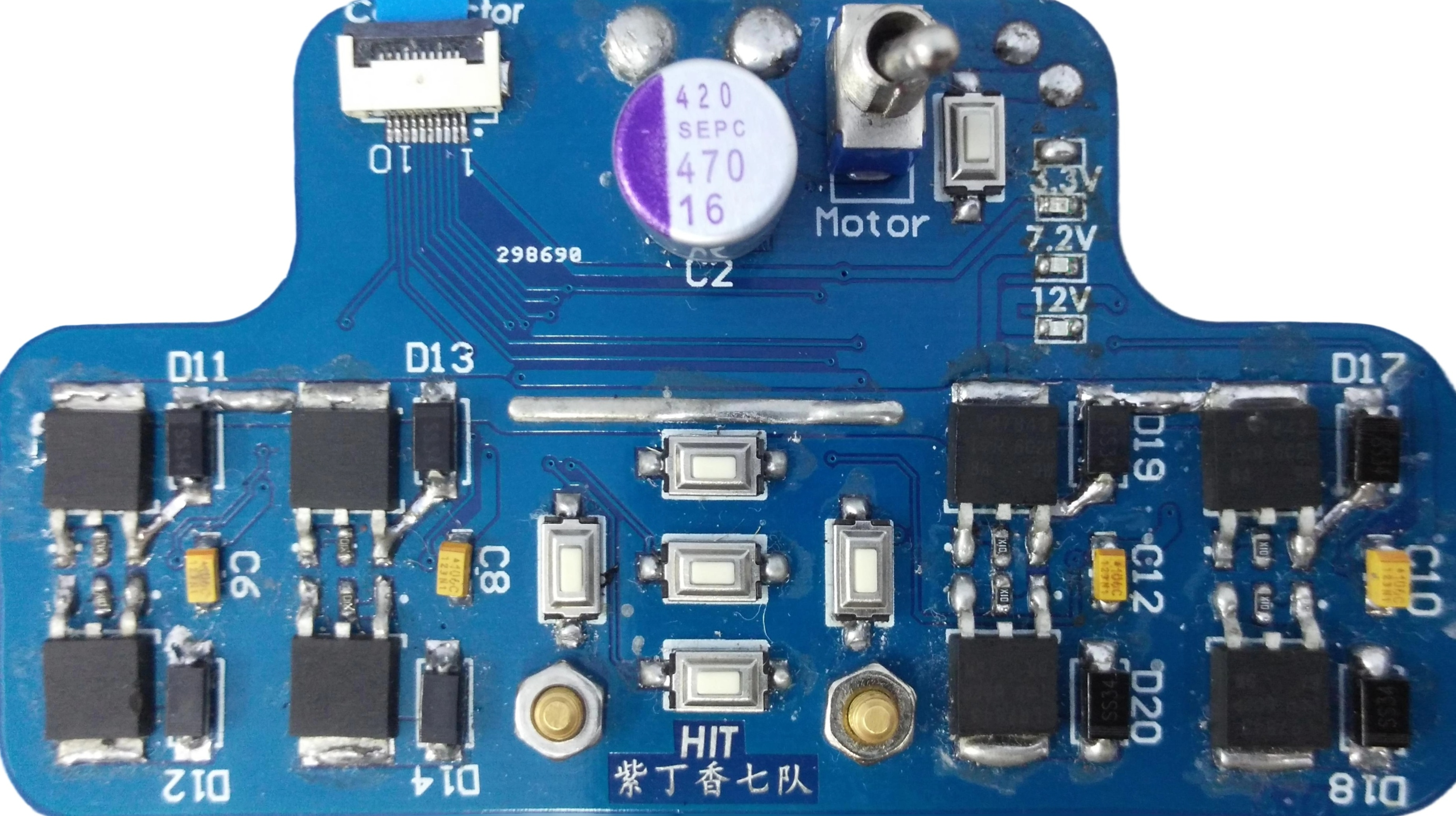
Schematic Diagram PCB Layout Physical Diagram
Motor Driver Board
Software Design
The entire software architecture is functionally divided into two interconnected modules: the Master Micro-controller Program and the Slave Micro-controller Program. The Slave Program is responsible for real-time identification and detection of critical environmental information, including the positions of opposing vehicles, locations of obstacle beacon lights, and boundary information, which are transmitted to the Master Micro-controller via UART communication. Concurrently, the Master Program processes the perception of activated beacon lights and executes data fusion to integrate inputs from both onboard sensors and the Slave Micro-controller, enabling robust behavioral decision-making and precise motion control of the vehicle. This hierarchical design ensures efficient resource allocation, with the Slave unit handling low-level sensing tasks while the Master unit focuses on high-level decision optimization.Since the perception module is primarily managed by the teammates, the following section focuses on the decision-making and control components of the system.
The overall software architecture is as follows.
Software Architecture
Strategy
Since the lighting sequence is unknown in advance and there is no global view of the competition field, this group essentially faces a partially observable incomplete-information multi-round repeated game problem, with decision variables being the vehicle's velocity and steering angle. To address the task requirements, we designed distinct vehicle states including Track Beacon, Obstacle Avoidance, Reverse, Overtake, Forgo, and Search. These states are managed through a finite state machine (FSM) that governs state transitions. In each state, specific velocity and steering angle settings are dynamically configured to optimize performance.
The state transition diagram of the state machine is shown below:
State Machine
Control
We employ a single-loop positional PD controller for vehicle steering control and a dual-loop incremental PI controller (comprising a speed loop and a current loop) for velocity control. Additionally, segmented parameter configurations are implemented based on different vehicle states, including adjustments to the differential ratio parameters and target speeds.
The control block diagram of the dual-loop velocity control is shown below:
Control Diagram
Demonstration
This is a demonstration video of our car's performance in different scenarios.
Car Functional Performance
Achievements
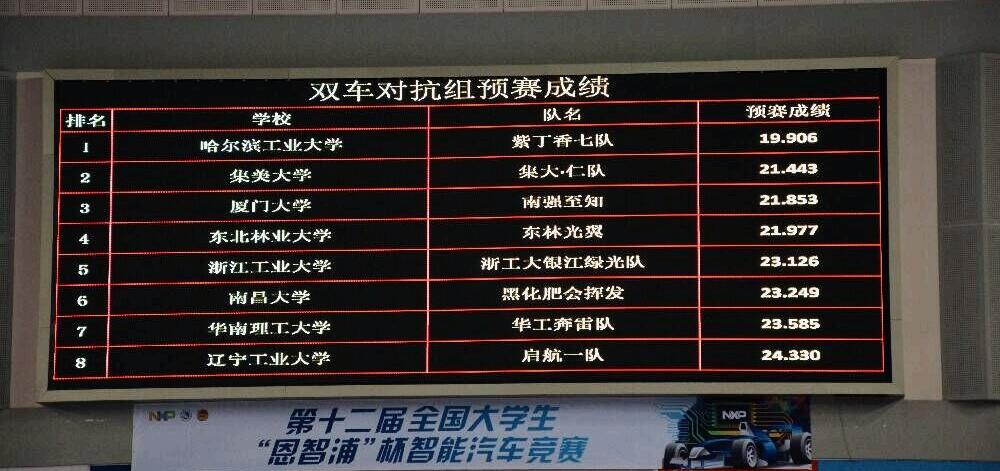
Ours team members joined the club through interviews in October, undergoing comprehensive training in software and hardware. After rigorous practice and team integration through on-campus competitions in the photoelectric group and camera group, we were selected to prepare for the Dual-Car Race in Innovative group. In May, we won the first prize with the top position at the Heilongjiang Provincial Competition. Following a successful technical report evaluation in July, we earned national qualification and competed in the national competition as ‘Lilac Team 7’. At the August national event hosted by Changshu Institute of Technology, we achieved the first place in the preliminary qualifying race with a time of 19.906 seconds among 45 teams and ultimately won the national runner-up in the final.
First Place in the The National Final Preliminary Race
First Prize in The Heilongjiang Provincial Competition National Runner-up in The National Final
Acknowledgement
I would like to express my heartfelt gratitude for my experience in the HIT Smartcar & Innovation Club.
This has been an unforgettable journey where I met many outstanding friends who shared the same passion and goals, forging deep bonds with each other with the relationships untainted by pretense, more akin to comradeship than mere friendship.
Here, I realized the childhood dream sparked by watching Bakusō Kyōdai Let's & Go!! (a racing anime),fulfilling my passion for four-wheel drive vehicles.Here, I improved my engineering implementation skills, hands-on abilities, systematic and innovative thinking, and teamwork abilities.
Thank you to the HIT Smartcar & Innovation Club for nurturing and cultivation, and to the advisors and senior members for their guidance and training. Special thanks to “Yi Jie”, “Zhe Ge”, “Kai Ge”, “Fa Ge”, “Song Ge”, “Feng Te”, “Xing Te”, “Lao Miu”, “Donghao Senpai”, and “Yuzhe Senpai” for their invaluable support and help in the club. (above are nicknames)
To my teammates DU Lingyu, HAN Yuejiang, JING Zhuangzhuang, and YAN Hanyang — thank you for our united efforts and unwavering perseverance. Thank you for supporting each other through countless days and nights of debugging our vehicles, and for sharing those sleepless, tireless moments of dedication.
Together, we turned challenges into triumphs, and this journey will forever remain a cherished chapter of my life.